Kalman Filter
- Kalman Filter
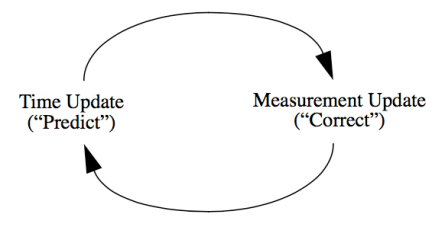
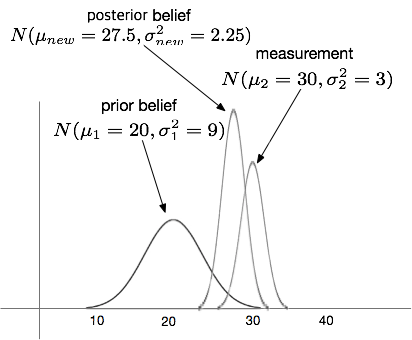
It works by a two-phase process having a prediction phase and an update phase.
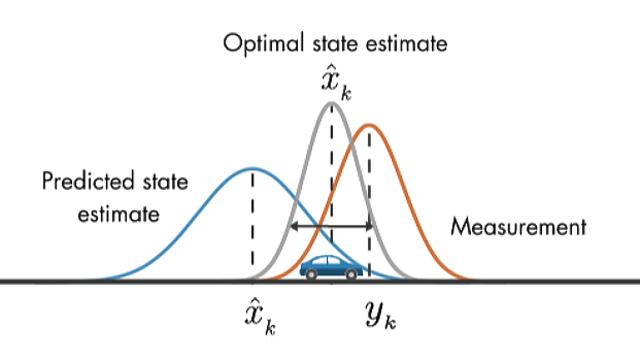
- For the prediction phase, the Kalman filter produces estimates of the current state variables, along with their uncertainties.
- Once the outcome of the next measurement (necessarily corrupted with some error, including random noise) is observed, these estimates are updated using a weighted average, with more weight being given to estimates with greater certainty.
- The algorithm is recursive. It can operate in real time, using only the present input measurements and the state calculated previously and its uncertainty matrix; no additional past information is required.
Conditions
|
- Prediction phase
Predict the current state distribution.
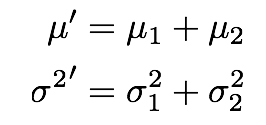
- μ : Average of probability distribution
- σ : Distribution of of probability distribution
- Update phase
Update posterior probability distribution.
- Example
1) Prior Belief
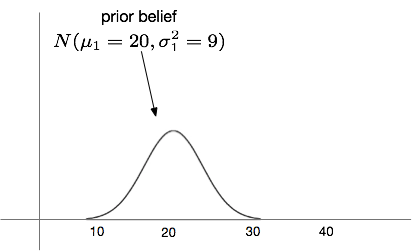
- μ1 : Suppose that the robot was 20 meters away.
- σ1 : Distribution
2) Current Belief
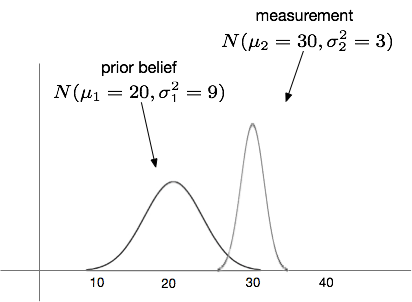
- μ2 : The Sensor measured that the robot is 30 meters.
- σ2 : Distribution
3) Updated Gaussian Probability Distribution
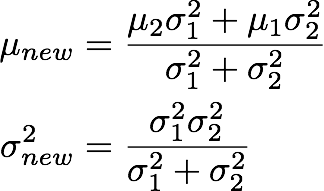
↓
∴
https://soohwan-justin.tistory.com/42
https://medium.com/@celinachild/kalman-filter-%EC%86%8C%EA%B0%9C-395c2016b4d6