- GNSS(Global Navigation Satellite System)
- The ancestor of the currently widely used Global Positioning System(GPS).
- A passive external acceptance sensor, where GPS receivers need to receive signals from more than three satellites to determine the position of the ground.
-If a GPS receiver is equipped with an atomic clock, only three satellites may be needed, but most GPS receivers are equipped with simpler clocks, so they must receive signals from at least four satellites to compensate for some time error.
- The position of the GNSS receiver is calculated based on the principle of trilateral measurement.
- Merits and Demerits of GNSS
- Merits
- GNSS operates globally and is used to locate receivers that exist everywhere on the Earth's surface.
- The advantage of using absolute position, so that there is no cumulative error in the IMU (Inertial Measurement Unit) and autometri sensors even after prolonged use.
- Demerits
- Disadvantages that there must be no obstruction between the receiver and the satellite to ensure proper operation.
- Consequently, it does not work properly indoors, such as in parking lots or tunnels.
- Degree of Freedom

- n-1 : The Degree of Freedom
- n : The number of sample
- μ : Mean
- σ : Standard Deviation
- Expected Value

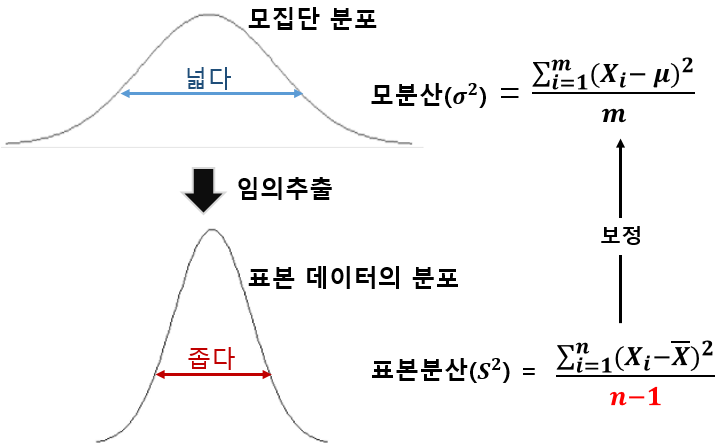
A random sample from the population has a smaller deviation between the data than the population does. because many values close to the mean in the population will be probabilistically sampled. The degree of spread is narrower in the sample than in the population because both extremes of the population will be less drawn.
∴ Therefore, when estimating the population variance with the variance obtained from the sample data, it is necessary to make the denominator smaller (n-1) to make the estimate larger to estimate as closely as possible.
Degrees of freedom
= (Sum of freedoms of the points) − (Number of independent constraints)
= (The number of sample) - (The number of constraint condition)case 1.
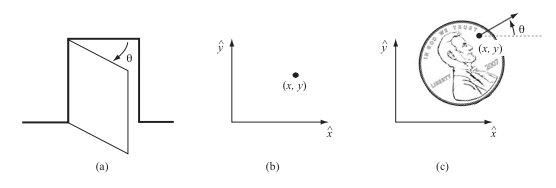
| - Degree of Freedom (a) : 1, the position and posture of the door are determined by only one variable θ. - Degree of Freedom (b) : 2, two variables (x, y) determine the position and posture of the point. - Degree of Freedom (c) : 3, the two variables (x, y) determine the position of the coin, the orientation of the coin is determined by θ. |
case 2.
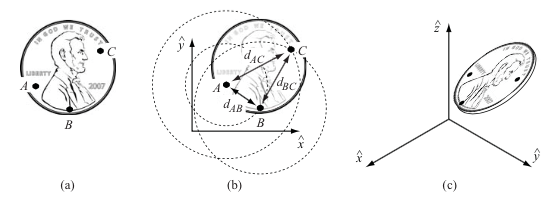
| - Degree of Freedom (a) : 3, 6-3 1. Number of variables : 6 2. constraints : 3 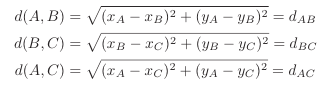 |
| - Degree of Freedom (b) : 3, 2+1(, 1. Degree of Freedom of A : 2 2. Degree of Freedom of B : 3, 2+1(xa,ya+ϕ) The position of B is in the circle that the radius is dAB. So the position of B is determined by the addtion of angle ϕ. 3. Degree of Freedom of C : 3, 2+1(xa,ya+ϕ) The position of C is the intersection of a circle centered on A and with a radious of |
| - Degree of Freedom (c) : 6, 9-3 1. the position of the three dots attached to the coin : 9 A B C 2. constraints : 3 |
'Autonomous Vehicle > Sensors' 카테고리의 다른 글
| Radar VS Lidar 2 (0) | 2023.10.04 |
|---|---|
| Time of Flight(ToF) (0) | 2023.10.04 |
| IMU, MEMS, Foucault pendulum, Coriolis force (0) | 2023.09.13 |
| Ultrasonic sensor, Trilateration (0) | 2023.08.29 |
| Radar VS Lidar 1 (0) | 2023.08.28 |