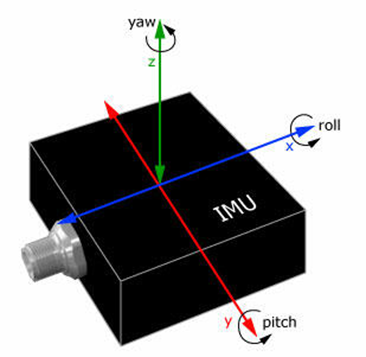
- IMU(Inertial Measurement Unit)
- It uses inertial sensors, especially gyroscopes, to determine the direction of the car based on a fixed coordinate system.
- Used for use in situations where satellite signals cannot be received, such as in a complex city center or indoors.
- Calculate the current position and posture (the direction the car is looking at).
- Utilize data collected by accelerometers and gyroscopes.
- Typically consists of three gyroscopes and three accelerometers.
- Provides six degrees of freedom posture estimation functions (X, Y, Z-axis + roll, pitch, yaw).
- The Micro Electro-Mechanical System(MEMS) works by measuring the Coriolis force.
- merits and demerits of IMU
Merits
- Passive sensors designed to detect parameters that can be measured at any time.
Demerits
- Noise, offset, conversion factor error, etc. may occur
- Errors may increase depending on weather or temperature
- In severe weather conditions where the weather changes rapidly, the air pressure at sea level may vary to the extent that the accuracy in the vertical direction may temporarily deteriorate.
- Micro Electro-Mechanical System(MEMS)

- verification mass(검증질량) : It is suspended by a support, designed to freely vibrate in the x-axis(operating direction), y-axis(sensor direction)
- motion electrode(운동전극) : It is used to create motiong mode vibration
- sensing electrode(감지전극) : It is used to measure the response of the sensing mode
- motion mode vibration(운동 모드 진동) : A mode in whice the verification mass is vibrated in the direction of motion
- detection mode(감지 모드) : It is used to detect the verification mass when moving in the detecton direction
| The verification mass is suspended by a support, and this verification mass is designed to freely vibrate in the x-axis in the operating direction and the y-axis in the sensor direction. The motion electrode is used to create motion mode vibration, and the sensing electrode is used to measure the response of the sensing mode. Motion mode vibration is a mode in which the verification mass is vibrated in the direction of motion, and the verification mass is resonated at the motion mode resonance frequency in the direction of motion by an external periodic force. The detection mode is used to detect the verification mass when moving in the detection direction. When the gyro rotates round, a periodic Coriolis force is generated in the sensing direction at the frequency of motion mode vibration. This corioli force moves the verification mass in the direction of detection and sends a signal to the sensing unit, and this periodic corioli reaction contributes to the signal by the sensing electrode. Such a linear vibration type gyro system can be assumed as a vibration system with two-dimensional freedom with mass m as shown in right picture. |
- Foucault pendulum
Example 1)
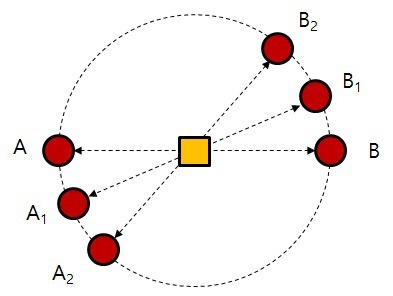
1. There is a pendulum swing between A and B.

2. The figure seen from above is shown in the following picture.

3. However, when the pendulum is actually tested, it does not move as shown above, it slowly moves and rotates with A1-B1 and A2-B2 over time.
Example 2)

An example of the application of this Corioli power can be seen in Foucault's pendulum.
Foucault's pendulum is a scale weight that is tied to a string that freely swings on a vertical plane.
The pendulum begins to swing exactly on the vertical plane, but due to the rotation of the Earth, it turns sideways over time against the vibrating vertical axis. This is because Corioli's power worked on the pendulum. When viewed from the northern hemisphere, the rotation moves clockwise.
'Autonomous Vehicle > Sensors' 카테고리의 다른 글
| Radar VS Lidar 2 (0) | 2023.10.04 |
|---|---|
| Time of Flight(ToF) (0) | 2023.10.04 |
| GNSS, Degree of Freedom (0) | 2023.09.12 |
| Ultrasonic sensor, Trilateration (0) | 2023.08.29 |
| Radar VS Lidar 1 (0) | 2023.08.28 |