- PID controller
A proportional integral derivative controller, calls a feedback control system. It is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control.
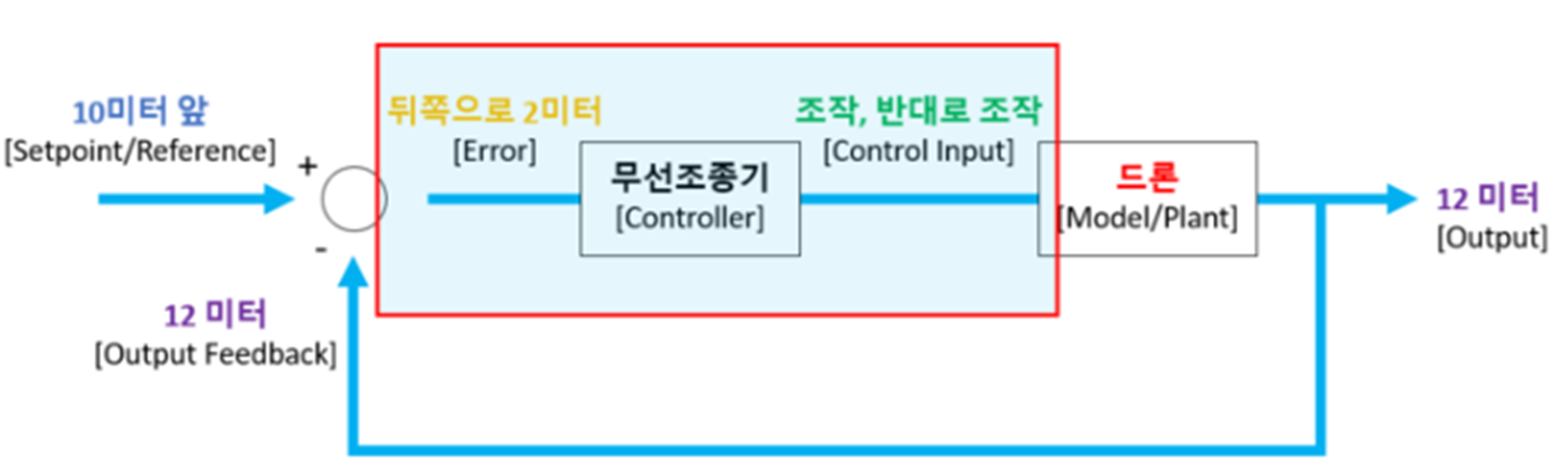
A system that uses feedback to control a particular Model(Plant).
- Closed-loop System or Negative Feedback Control System
- A closed loop system : The reason why it calls a closed loop system is the flow in the diagram is a form in whichloops are connected(closed) to each otheras below. The output(12 meters) is going back to the beginning, and it affects to next Control Input.
- Negative Feedback Control System : Error is calculated by the difference between the Setpoint and Output(Error=Setpoint-Output), and it goes to the feedback. In other words, the Error is calculated -(negative).
Description
|
- Open-loop System
Opposite concept of Closed-loop System or Negative Feedback Control System.
There is no extra control after Output. The stream flows one direction, no extra manipulate, so the loop is not connected, it is opened.

- PID controller formula
- A whole formula
 u(t) : Control Input e(t) : Error, Error=Setpoint-Output t : specific time |
- The first side of a formula
 Kp : Proportional Gain If Kp is 1, u(t) is -2. (10-12). So the controller will control the system by -2. If Kp is 2, the controller will manipulate the system by -4, if 3, -6. |
- The second side of a formula
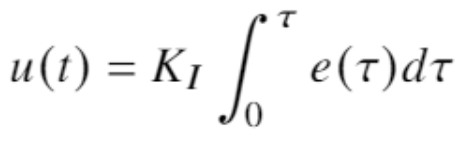 KI : Integral Gain |
| KI(time) | error | Integral |
| 0 sec | 10 | |
| 1 sec | -2 (12-10) | 8 (10+(-2)) |
| 2 sec | 16 (2*8) | |
| 3 sec | 24 (3*8) | |
| ... | ... | ... |
Integral : Total sum of errors.
If KI is 2, the controller will manipulate the system by 16, if 3, 24.
- The last side of a formula
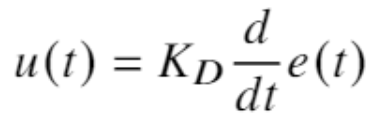
KD : Derivative Gain
| KD(time) | error | Derivative |
| 0 sec | 10 | |
| 1 sec | -2 (12-10) | -12 (-2-(10)) |
| 2 sec | -24 (2*(-12)) | |
| 3 sec | -36(3*(-12)) | |
| ... | ... | ... |
Derivative : The amount of variation
If KD is 2, the controller will manipulate the system by -24, if 3, -36.
'Autonomous Vehicle' 카테고리의 다른 글
| epiline, Epipole (0) | 2023.09.11 |
|---|---|
| RSSI, dB, dBm (0) | 2023.08.29 |
| Kinetics VS Kinematics (0) | 2023.07.06 |
| Angular Motion VS Linear Motion (0) | 2023.07.06 |
| Plane angle VS Solid angle (0) | 2023.07.04 |