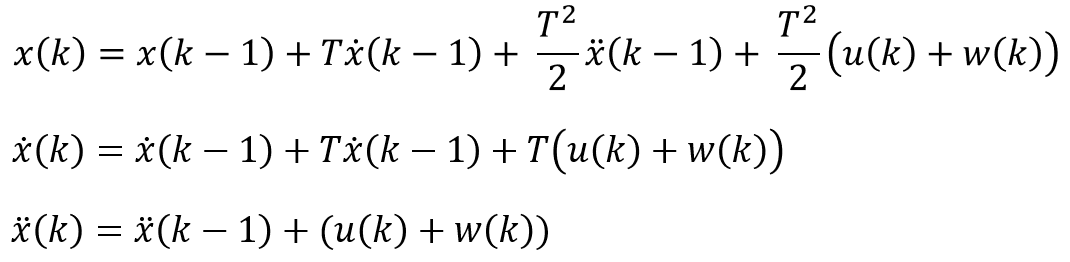
- State Equation

Indicates the relationship between the previous state (ex. position) and the current state.
It breaks down as follows.
It can group as follows.

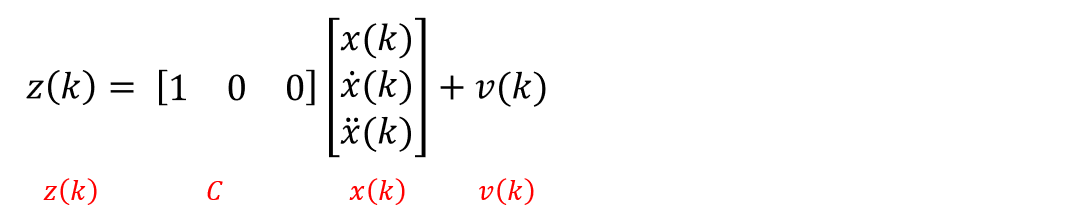
- Measurement Equation

Indicates the relationship between the current state and the sensor data.
It breaks down as follows.
1. Decomposition of State Equation
- The positional state

: the position of the object in the k-th step. : the velocity of the object in the k-th step. : the acceleration of the object in the k-th step. : time interval between each step.
- Distance
- Control Input
Extra Input Acceleration.
- Noise of Control Input
- Velocity
Velocity = Current Velocity + Acceleration * Time + Extra Input Acceleration + Control Input noise
- Acceleration

- Acceleration of previous step
- State Matrix VS Control Matrix
You can group the previous equations as above.
A Matrix : State Matrix, for state modeling.
B Matrix : Control Matrix, for defining the control input.
2. Decomposition of Measurement Equation

: Sensor data pointing to location : Sensor noise(Distribution)
- Distribution

If the sensor noise is small (Small Distribution) : it is superimposed on a narroa area.
If the sensor noise is large (Large Distribution) : the area where the sensor recognizes the object appears very wide. It becomes difficult to accurately locate the object.
Because of this noise, it cannot always be and an error occurs.- Transition Matrix

C Matrix : Transition Matrix
Match the three dimensions (Position, Velocity, Acceleration) in the state estimation equation to one dimension (position) of the sensor data.
'Autonomous Vehicle > Theory' 카테고리의 다른 글
| Kalman Filter (0) | 2024.03.14 |
|---|---|
| Prediction Step, Motion Model, Correction Step, Observation Model (0) | 2024.03.14 |
| (prerequisite-Kalman Filter) Bayes' Theorem(Baysianism) (0) | 2024.03.13 |
| Probability Distribution, Random Variable, Probability Function, Cumulative Distribution Function (0) | 2024.03.13 |
| (prerequisite-Kalman Filter) Localization, Tracking (0) | 2023.07.06 |