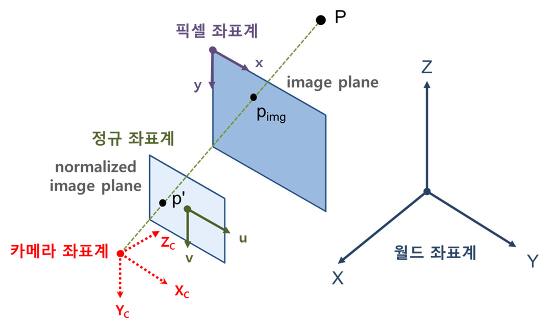
- World Coordinate System
A coordinate system based on a point in space where we live, arbitrarily coordinate, for example,
you can point one corner of the room to the origin, and you can set one wall to the X-axis, the other to the Y-axis, and the sky to the Z-axis.
- Camera Coordinate System

A coordinate system based on a camera.
- Image Coordinate System(Pixel Image Coordinate System)
A coordinate system for the images we see with our real eyes.
- image plane
The image obtained through a camera.
The plane determined by the x-axis and y-axis on the Pixel Image Coordinate System.
A point
- Normalized Image Coordinate System
Image coordinate system that removes the influence of the camera's internal parameters.
Virtual image plane with 1 distance from camera focus.
In other words, an image plane in which the original image plane was moved in parallel to a point where the distance from the camera focal point was 1.
The reason why using Virtual image plane is because geometric interpretation is easier to do on a Normalized Image Coordinate System with camera parameters removed.
Transformation between pixel coordinates and normal coordinates.
-
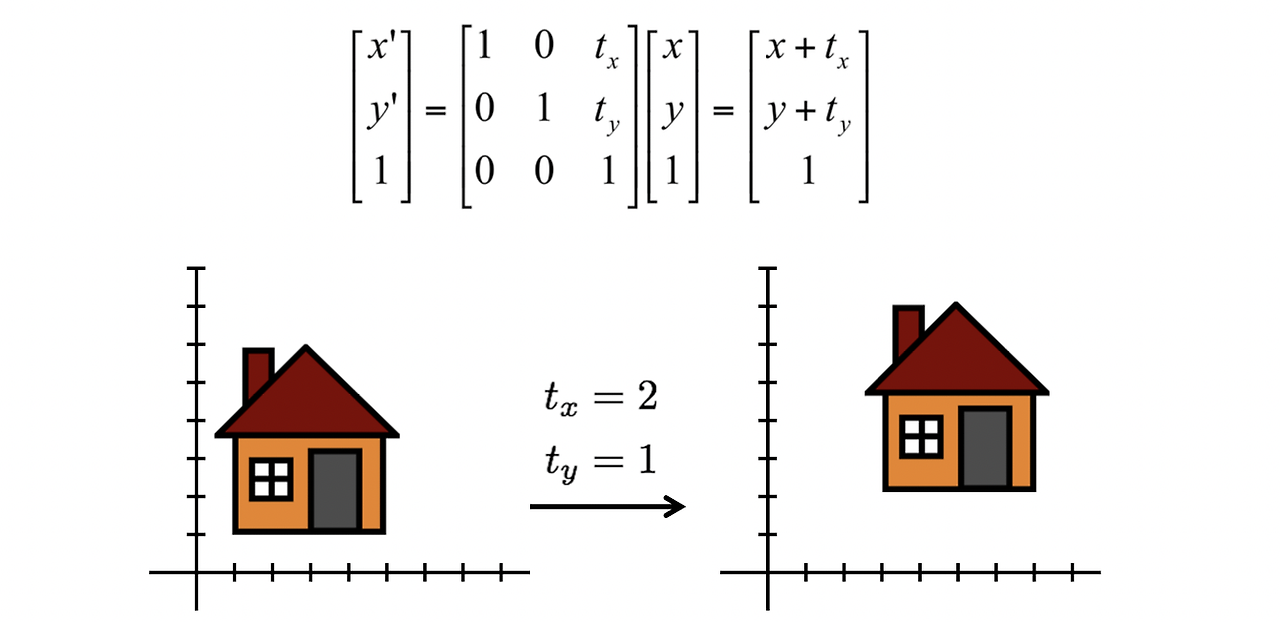
- Homogeneous Coordinates

To represent a 2D point as a 3D vector, 1 is added to the bottom.
An affine transformation or a projective transformation can be expressed as a single matrix using with homogeneous coordinate systems.
- 2D to Homogeneous Coordinates
(x, y) -> (x, y, 1)(x, y) -> (wx, wy, w)
w : nonzero constant
- 3D to Homogeneous Coordinates
(X, Y, Z) -> (X, Y, Z, 1)
Or
(X, Y, Z) -> (wX, wY, wZ, w)
p' = (u, v) -> p' = (u, v, 1)- Homogeneous Coordinates to 2D
Change the end to 1 and eliminate.
(x, y, α) = (x/α, y/α, 1) -> (x/α, y/α)
https://velog.io/@richpin/Computer-Vision-07-2D-Transformations
'Autonomous Vehicle > Video Geometry' 카테고리의 다른 글
| Homography (0) | 2024.07.25 |
|---|---|
| Camera Calibration (0) | 2024.07.23 |
| 3D Transformations (0) | 2024.07.19 |
| 2D Transformations (0) | 2024.07.19 |
| Epipolar Geometry (0) | 2023.09.11 |